(name not final)
The Team

Safety first! We are the team from Visma Consulting, returning to ARIoT for the 3rd year. (still undefeated)
The Plan
Our solution this year is focused on construction work and big machinery, and how to automate various tasks.
Our main feature is last years price, Bucket Wheel Excavator, which we intend to automate as a means to show how IoT, AI and big equipment can come together. We also intend to add many safety features for the people working at close to heavy equipment.

Our first goal is to be able to remotely control this beast, before we will improve it. Our plan to start with was a bit vague, but looked a bit like this:
- Add new and improved engines that allows turning
- Connect said engines to the internet!
- Add loud-noise activated safety stop. (Automatically stop on screams)
- Add camera that with the help of AI can identify nearby cars by registration number and keep a log of cars that drive by often. (possible attackers!)
- Use camera to identify where to dig. Possibly spotting of digging location by remote controlled drone.
- ?? (aka. come up with ideas as we go along)
We are a bit of a .NET heavy team, so our first choice will in most cases be C# when it comes to code and Azure when it comes to cloud, though we are not afraid to get our hands dirty and use assembly or the bookstore cloud if needed.
The hardware

We have a few Raspberry Pis with us for the more heavy calculations, and other devices like quite a few Wemos D1 mini (and other similar ESP8266-devices) for the more soldering and lighter tasks.
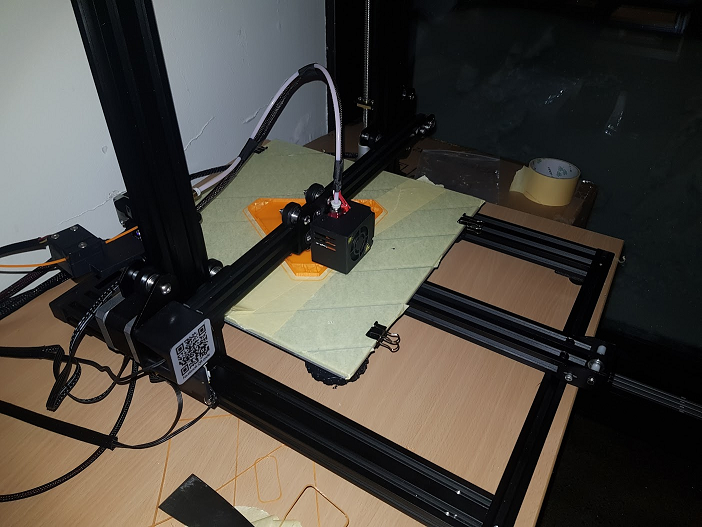
We are also bringing quite a bit of other electronic components, and a 3D printer in case we need some custom made gear.
The architecture
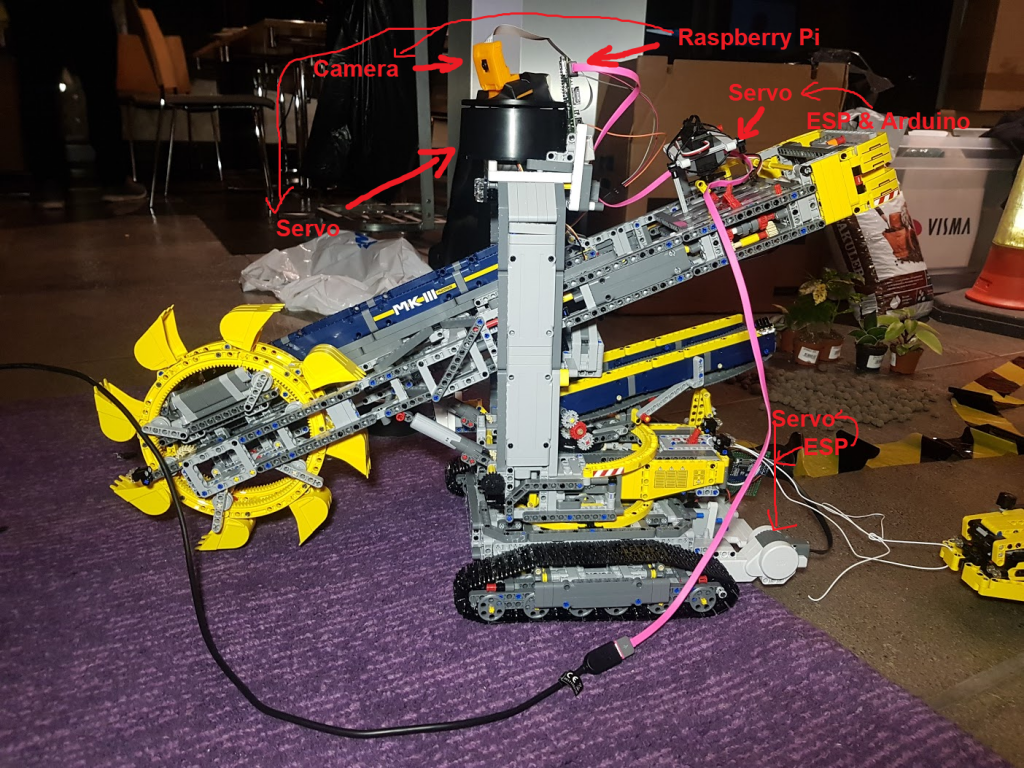
First a quick picture of our machine
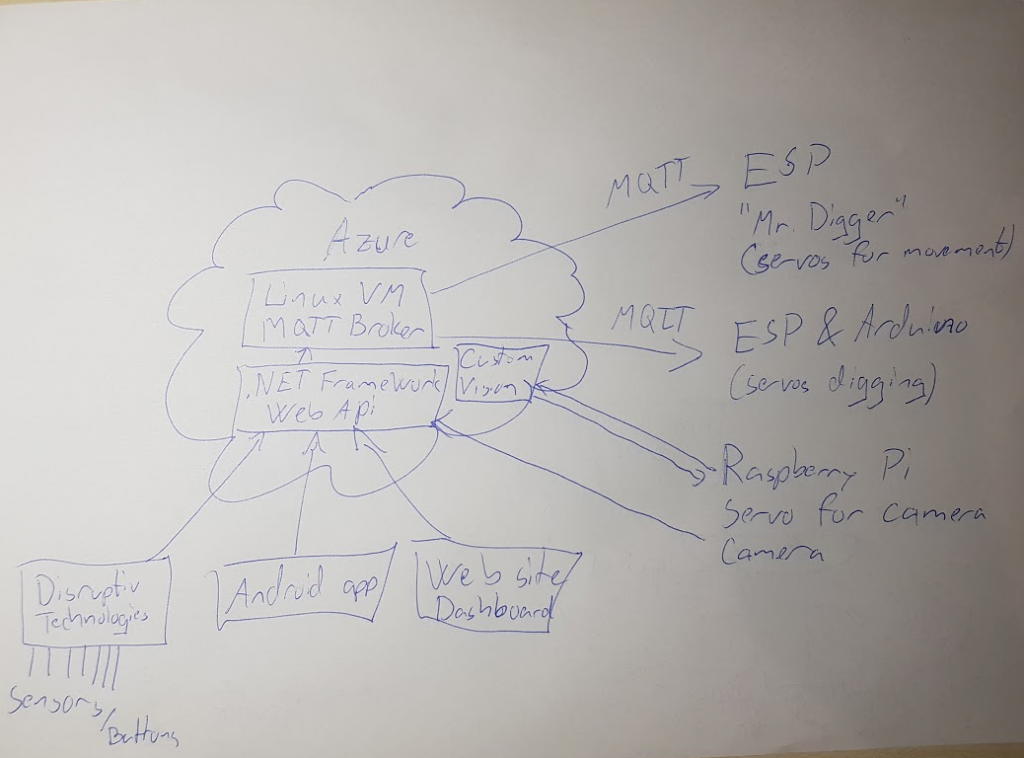
We are using a sensor set from the norwegian company Disruptive Technologies which are small buttons mounted we have mounted on various gear. These connect to DTs backend over a 4G gateway via an proprietary protocol. This API relays data to our API in Azure. The same does our Android app and our dashboard website. All of which are used to control the machinery.
Our API forwards data to an MQTT broker we set up on a virtual machine. The micro controllers on the Digger Bot 3000 are listening to messages here, and trigger movement and digging.

On the Digger Bot 3000 we also have a Raspberry Pi running Raspbian. This one is controlling a servo to turn a camera. It then takes pictures with this camera, sends the images to an Azure Custom Vision service which we have trained with around 200 images. Based on the image this service can tell us if it contains a suitable target to dig. After getting the response from this service the Raspberry either moves the camera for further pictures, or sends a message to our API for the machine to move.
(finally) Going for [Description here]